
Movimiento Neuro-Inspirado basado en Spike: Sensor de Visión Dinámica al Control de Bucle Abierto del Motor Robot a través de Spike-VITE
Lista de Autores: Pérez Peña, Fernando. Morgado Estévez, Arturo. Linares Barranco, Alejandro. Jiménez Fernández, Angel. Gómez Rodríguez, Francisco. Jimenez Moreno, Gabriel. López Cororonado, Juan.
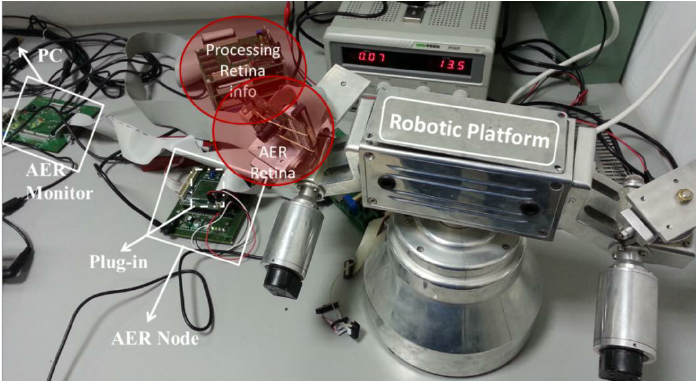
En este trabajo presentamos una arquitectura completa basada en picos: desde un Sensor de Visión Dinámica (retina) hasta una plataforma robótica de cabeza estéreo. El objetivo de esta investigación es reproducir los movimientos intencionales realizados por los seres humanos teniendo en cuenta tantas características como sea posible desde el punto de vista biológico. Este documento llena el vacío entre los actuales sensores de silicio y los actuadores robóticos mediante la aplicación de una estrategia de procesamiento de picos a los flujos de datos en tiempo real. La arquitectura se divide en capas: la retina, el procesamiento de información visual, la capa del generador de trayectoria que utiliza un algoritmo neuroinspirado (SVITE) que puede ser replicado en tantas veces como DoF el robot tiene; Y finalmente la capa de actuación para suministrar los picos al robot (usando PFM). Todas las capas realizan sus tareas en un modo de procesamiento de puntas, y se comunican entre sí a través del protocolo AER neuro-inspirado. El controlador de bucle abierto se implementa en FPGA usando interfaces AER desarrolladas por RTC Lab. Los resultados experimentales revelan la viabilidad de este controlador basado en picos. Dos ventajas principales son: bajos recursos de hardware (2% de un Xilinx Spartan 6) y requisitos de potencia (3,4 W) para controlar un robot con un alto número de DoF (hasta 100 para un Xilinx Spartan 6). También evidencia el uso adecuado de AER como un protocolo de comunicación entre procesamiento y actuación.